easyidp.reconstruct.Sensor¶
- class easyidp.reconstruct.Sensor¶
相机模型的基类
- __init__()¶
Methods
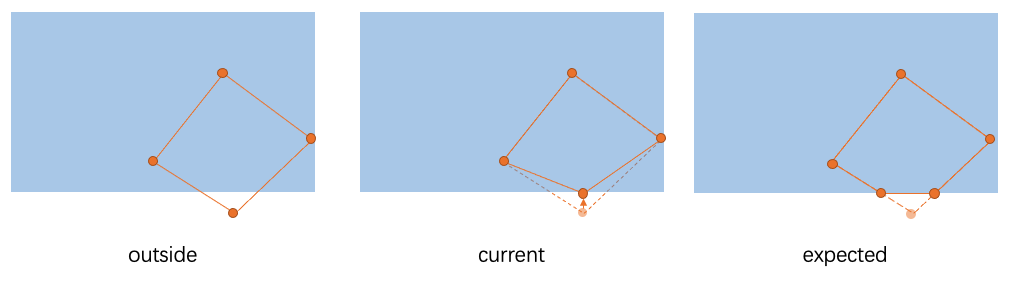
__init__()in_img_boundary(polygon_hv[, ignore, log])判断给定的多边形是否在图像区域内,如果指定忽略,则将点移动到边界。
Attributes
此3D重建项目中的传感器ID,通常只有一个。
传感器标签/名称,
<class 'str'>传感器类型在[frame, fisheye, spherical, rpc]中(通常用于metashape项目),
<class 'str'>传感器宽度像素数,
<class 'int'>传感器高度像素数,
<class 'int'>传感器实际宽度,单位为毫米,
<class 'float'>传感器实际高度,单位为毫米,
<class 'float'>一个像素宽度的比例,单位为毫米,
<class 'float'>一个像素高度的比例,单位为毫米,
<class 'float'>一个像素的比例,对于pix4d,[pixel_height, pixel_width]
焦距,单位为毫米,
<class 'float'>传感器校准信息,
easyidp.Calibration- calibration¶
传感器校准信息,
easyidp.Calibration
- focal_length¶
焦距,单位为毫米,
<class 'float'>
- h_mm¶
传感器实际高度,单位为毫米,
<class 'float'>
- height¶
传感器高度像素数,
<class 'int'>
- id¶
此3D重建项目中的传感器ID,通常只有一个。
<class 'int'>
- in_img_boundary(polygon_hv, ignore=None, log=False)¶
判断给定的多边形是否在图像区域内,如果指定忽略,则将点移动到边界。
- 参数:
polygon_hv (numpy nx2 array) -- [水平,垂直] 像素坐标中的点
ignore (str | None, optional) --
是否容忍图像外的小部分
None:严格在图像区域内;x:仅y(垂直)在图像区域内,x可以在图像外;y:仅x(水平)在图像区域内,y可以在图像外。
待处理
此API将在未来增强和更改。
ignore(str) ->ignore_overflow(bool):True:严格在图像区域内,默认值;False:在图像范围内裁剪多边形;
log (bool, optional) -- 是否打印日志以进行调试,默认值为False
- 返回类型:
None | polygon_hv
- label¶
传感器标签/名称,
<class 'str'>
- pixel_height¶
一个像素高度的比例,单位为毫米,
<class 'float'>
- pixel_size¶
一个像素的比例,对于pix4d,[pixel_height, pixel_width]
- pixel_width¶
一个像素宽度的比例,单位为毫米,
<class 'float'>
- type¶
传感器类型在[frame, fisheye, spherical, rpc]中(通常用于metashape项目),
<class 'str'>
- w_mm¶
传感器实际宽度,单位为毫米,
<class 'float'>
- width¶
传感器宽度像素数,
<class 'int'>